搜索
本章重点探讨搜索和排序,它们是最常见的计算机科学问题。本节探讨搜索,5.3节研究排序。搜索是指从元素集合中找到某个特定元素的算法过程。搜索过程通常返回 True 或 False,分别表示元素是否存在。有时,可以修改搜索过程,使其返回目标元素的位置。不过,本节仅考虑元素是否存在。
Python 提供了运算符 in,通过它可以方便地检查元素是否在列表中。
>>> 15 in [3, 5, 2, 4, 1]
False
>>> 3 in [3, 5, 2, 4, 1]
True
>>>尽管写起来很方便,但是必须经过一个深层的处理过程才能获得结果。事实上,搜索算法有很多种,我们感兴趣的是这些算法的原理及其性能差异。
顺序搜索
存储于列表等集合中的数据项彼此存在线性或顺序的关系,每个数据项的位置与其他数据项相关。在 Python 列表中,数据项的位置就是它的下标。因为下标是有序的,所以能够顺序访问,由此可以进行 顺序搜索。
图5-1展示了顺序搜索的原理。从列表中的第一个元素开始,沿着默认的顺序逐个查看,直到找到目标元素或者查完列表。如果查完列表后仍没有找到目标元素,则说明目标元素不在列表中。

顺序搜索算法的 Python 实现如代码清单5-1 所示。这个函数接受列表与目标元素作为参数,并返回一个表示目标元素是否存在的布尔值。布尔型变量 found 的初始值为 False,如果找到目标元素,就将它的值改为 True。
def sequentialSearch(alist, item):
pos = 0
found = False
while pos < len(alist) and not found:
if alist[pos] == item:
found = True
else:
pos = pos + 1
return found
testlist = [1, 2, 32, 8, 17, 19, 42, 13, 0]
print(sequentialSearch(testlist, 3))
print(sequentialSearch(testlist, 13))分析顺序搜索算法
在分析搜索算法之前,需要定义计算的基本单元,这是解决此类问题的第一步。对于搜索来说,统计比较次数是有意义的。每一次比较只有两个结果:要么找到目标元素,要么没有找到。本节做了一个假设,即元素的排列是无序的。也就是说,目标元素位于每个位置的可能性都一样大。
要确定目标元素不在列表中,唯一的方法就是将它与列表中的每个元素都比较一次。如果列表中有 n 个元素,那么顺序搜索要经过 n 次比较后才能确定目标元素不在列表中。如果列表包含目标元素,分析起来更复杂。实际上有 3 种可能情况,最好情况是目标元素位于列表的第一个位置,即只需比较一次;最坏情况是目标元素位于最后一个位置,即需要比较 n 次。
普通情况又如何呢?我们会在列表的中间位置处找到目标元素,即需要比较 n/2 次。当 n 变大时,系数会变得无足轻重,所以顺序搜索算法的时间复杂度是 \$O(n)\$。表5-1 总结了 3 种可能情况的比较次数。

前面假设列表中的元素是无序排列的,相互之间没有关联。如果元素有序排列,顺序搜索算法的效率会提高吗?
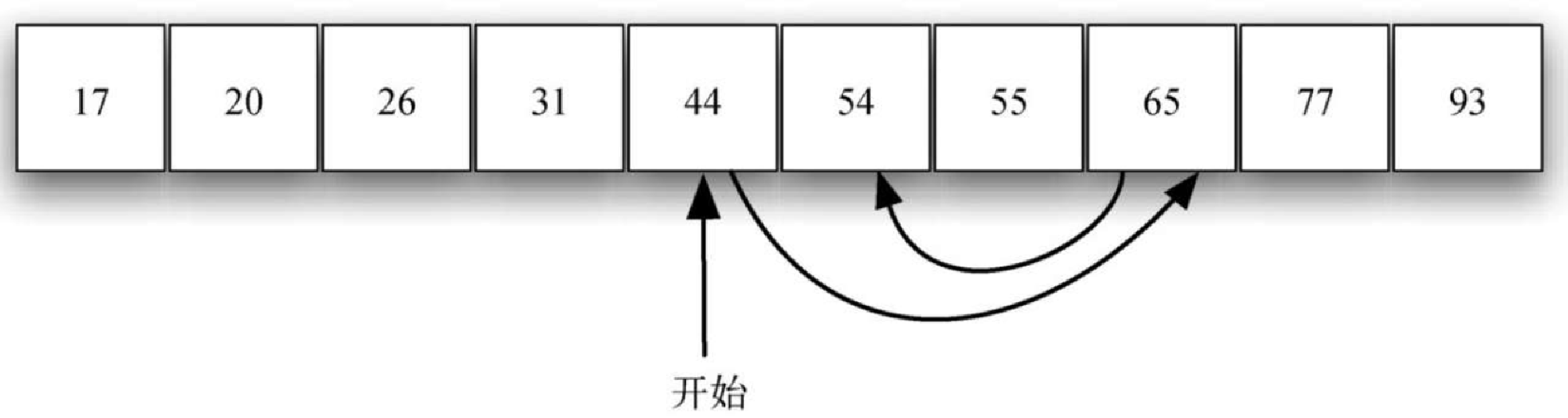
假设列表中的元素按升序排列。如果存在目标元素,那么它出现在 n 个位置中任意一个位置的可能性仍然一样大,因此比较次数与在无序列表中相同。不过,如果不存在目标元素,那么搜索效率就会提高。图5-2 展示了算法搜索目标元素 50 的过程。注意,顺序搜索算法一路比较列表中的元素,直到遇到 54。该元素蕴含额外的信息:54 不仅不是目标元素,而且其后的元素也都不是,这是因为列表是有序的。因此,算法不需要搜完整个列表,比较完 54 之后便可以立即停止。代码清单5-2 展示了有序列表的顺序搜索函数。

def orderedSequentialSearch(alist, item):
pos = 0
found = False
stop = False
while pos < len(alist) and not found and not stop:
if alist[pos] == item:
found = True
else:
if alist[pos] > item:
stop = True
else:
pos = pos + 1
return found
testlist = [0, 1, 2, 8, 13, 17, 19, 32, 42, ]
print(orderedSequentialSearch(testlist, 3))
print(orderedSequentialSearch(testlist, 13))表5-2 总结了在有序列表中顺序搜索时的比较次数。在最好情况下,只需比较一次就能知道目标元素不在列表中。普通情况下,需要比较 n/2 次,不过算法的时间复杂度仍是 \$O(n)\$。总之,只有当列表中不存在目标元素时,有序排列元素才会提高顺序搜索的效率。

二分搜索
如果在比较时更聪明些,还能进一步利用列表有序这个有利条件。在顺序搜索时,如果第一个元素不是目标元素,最多还要比较 n-1 次。但二分搜索不是从第一个元素开始搜索列表,而是从中间的元素着手。如果这个元素就是目标元素,那就立即停止搜索;如果不是,则可以利用列表有序的特性,排除一半的元素。如果目标元素比中间的元素大,就可以直接排除列表的左半部分和中间的元素。这是因为,如果列表包含目标元素,它必定位于右半部分。
接下来,针对右半部分重复二分过程。从中间的元素着手,将其和目标元素比较。同理,要么直接找到目标元素,要么将右半部分一分为二,再次缩小搜索范围。图5-3 展示了二分搜索算法如何快速地找到元素 54,完整的函数如代码清单5-3 所示。
def binarySearch(alist, item):
first = 0
last = len(alist) - 1
found = False
while first <= last and not found:
midpoint = (first + last) // 2
if alist[midpoint] == item:
found = True
else:
if item < alist[midpoint]:
last = midpoint - 1
else:
first = midpoint + 1
return found
testlist = [0, 1, 2, 8, 13, 17, 19, 32, 42, ]
print(binarySearch(testlist, 3))
print(binarySearch(testlist, 13))请注意,这个算法是分治策略的好例子。分治是指将问题分解成小问题,以某种方式解决小问题,然后整合结果,以解决最初的问题。对列表进行二分搜索时,先查看中间的元素。如果目标元素小于中间的元素,就只需要对列表的左半部分进行二分搜索。同理,如果目标元素更大,则只需对右半部分进行二分搜索。两种情况下,都是针对一个更小的列表递归调用二分搜索函数,如代码清单5-4 所示。
def binarySearch(alist, item):
if len(alist) == 0:
return False
else:
midpoint = len(alist) // 2
if alist[midpoint] == item:
return True
else:
if item < alist[midpoint]:
return binarySearch(alist[:midpoint], item)
else:
return binarySearch(alist[midpoint + 1:], item)
testlist = [0, 1, 2, 8, 13, 17, 19, 32, 42, ]
print(binarySearch(testlist, 3))
print(binarySearch(testlist, 13))分析二分搜索算法
在进行二分搜索时,每一次比较都将待考虑的元素减半。那么,要检查完整个列表,二分搜索算法最多要比较多少次呢?假设列表共有 n 个元素,第一次比较后剩下 n/2 个元素,第 2 次比较后剩下 n/4 个元素,接下来是 n/4,然后是 n/16,依此类推。列表能拆分多少次呢?表5-3 给出了答案。
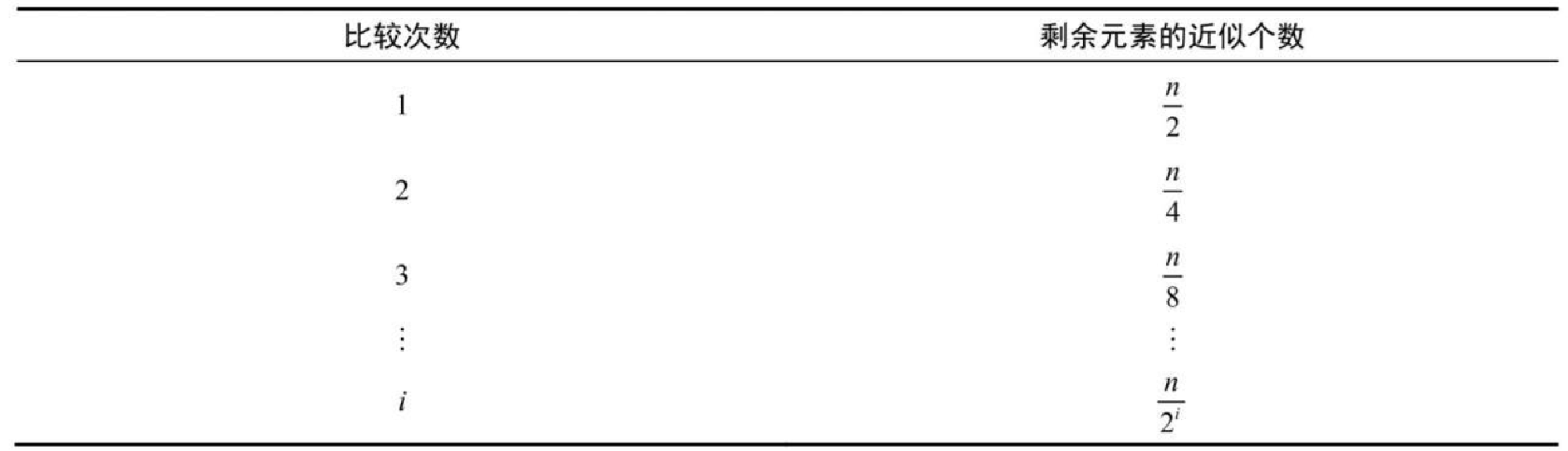
拆分足够多次后,会得到只含一个元素的列表。这个元素要么就是目标元素,要么不是。无论是哪种情况,计算工作都已完成。要走到这一步,需要比较 i 次,其中 \$n/2^i=1\$。由此可得,\$i=logn\$。比较次数的最大值与列表的元素个数是对数关系。所以,二分搜索算法的时间复杂度是 \$O(logn)\$。
还有一点要注意。在代码清单5-4 中,递归调用 binarySearch(alist[:midpoint],item) 使用切片运算符得到列表的左半部分,并将其传给下一次调用(右半部分类似)。前面的分析假设切片操作所需的时间固定,但实际上在 Python 中,切片操作的时间复杂度是 \$O(k)\$。这意味着若采用切片操作,那么二分搜索算法的时间复杂度不是严格的对数阶。所幸,通过在传入列表时带上头和尾的下标,可以弥补这一点。作为练习,请参考代码清单5-3 计算下标。
尽管二分搜索通常优于顺序搜索,但当 n 较小时,排序引起的额外开销可能并不划算。实际上应该始终考虑,为了提高搜索效率,额外排序是否值得。如果排序一次后能够搜索多次,那么排序的开销不值一提。然而,对于大型列表而言,只排序一次也会有昂贵的计算成本,因此从头进行顺序搜索可能是更好的选择。
散列
我们已经利用元素在集合中的位置完善了搜索算法。举例来说,针对有序列表,可以采用二分搜索(时间复杂度为对数阶)找到目标元素。本节将尝试更进一步,通过散列构建一个时间复杂度为 \$O(1)\$ 的数据结构。
要做到这一点,需要了解更多关于元素位置的信息。如果每个元素都在它该在的位置上,那么搜索算法只需比较一次即可。不过,我们在后面会发现,事实往往并非如此。
散列表是元素集合,其中的元素以一种便于查找的方式存储。散列表中的每个位置通常被称为槽,其中可以存储一个元素。槽用一个从 0 开始的整数标记,例如 0 号槽、1 号槽、2 号槽,等等。初始情形下,散列表中没有元素,每个槽都是空的。可以用列表来实现散列表,并将每个元素都初始化为 Python 中的特殊值 None。图5-4 展示了大小 m 为 11 的散列表。也就是说,表中有 m 个槽,编号从 0 到 10。

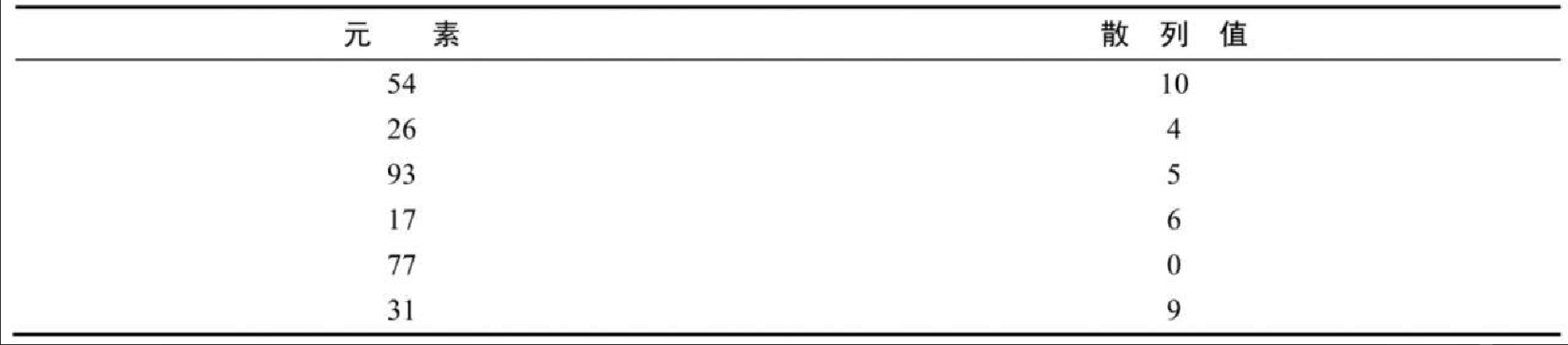
散列函数将散列表中的元素与其所属位置对应起来。对散列表中的任一元素,散列函数返回一个介于 0 和 m-1 之间的整数。假设有一个由整数元素 54、26、93、17、77 和 31 构成的集合。首先来看第一个散列函数,它有时被称作 “取余函数”,即用一个元素除以表的大小,并将得到的余数作为散列值(h(item) =item%11)。表5-4 给出了所有示例元素的散列值。取余函数是一个很常见的散列函数,这是因为结果必须在槽编号范围内。
计算出散列值后,就可以将每个元素插入到相应的位置,如图5-5 所示。注意,在 11 个槽中,有 6 个被占用了。占用率被称作载荷因子,记作 λ,定义如下。

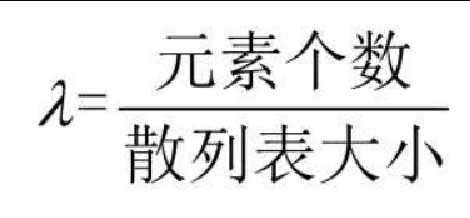
在本例中,\$λ=6/11\$
搜索目标元素时,仅需使用散列函数计算出该元素的槽编号,并查看对应的槽中是否有值。因为计算散列值并找到相应位置所需的时间是固定的,所以搜索操作的时间复杂度是 \$O(1)\$。如果一切正常,那么我们就已经找到了常数阶的搜索算法。
可能你已经看出来了,只有当每个元素的散列值不同时,这个技巧才有用。如果集合中的下一个元素是 44,它的散列值是 0(44%11==0),而 77 的散列值也是 0,这就有问题了。散列函数会将两个元素都放入同一个槽,这种情况被称作冲突,也叫 “碰撞”。显然,冲突给散列函数带来了问题,我们稍后详细讨论。
-
散列函数
给定一个元素集合,能将每个元素映射到不同的槽,这种散列函数称作完美散列函数。如果元素已知,并且集合不变,那么构建完美散列函数是可能的。不幸的是,给定任意一个元素集合,没有系统化方法来保证散列函数是完美的。所幸,不完美的散列函数也能有不错的性能。
构建完美散列函数的一个方法是增大散列表,使之能容纳每一个元素,这样就能保证每个元素都有属于自己的槽。当元素个数少时,这个方法是可行的,不过当元素很多时,就不可行了。如果元素是 9 位的社会保障号,这个方法需要大约 10 亿个槽。如果只想存储一个班上 25 名学生的数据,这样做就会浪费极大的内存空间。
我们的目标是创建这样一个散列函数:冲突数最少,计算方便,元素均匀分布于散列表中。有多种常见的方法来扩展取余函数,下面介绍其中的几种。
折叠法先将元素切成等长的部分(最后一部分的长度可能不同),然后将这些部分相加,得到散列值。假设元素是电话号码 436-555-4601,以 2 位为一组进行切分,得到 43、65、55、46 和 01。将这些数字相加后,得到 210。假设散列表有 11 个槽,接着需要用 210 除以 11,并保留余数 1。所以,电话号码 436-555-4601 被映射到散列表中的 1 号槽。有些折叠法更进一步,在加总前每隔一个数反转一次。就本例而言,反转后的结果是:43+56+55+64+01=219,219%11=10。
另一个构建散列函数的数学技巧是平方取中法:先将元素取平方,然后提取中间几位数。如果元素是 44,先计算 442=1936,然后提取中间两位 93,继续进行取余的步骤,得到 5(93%11)。表5-5 分别展示了取余法和平方取中法的结果,请确保自己理解这些值的计算方法。
 Figure 10. 表5-5 取余法和平方取中法的对比
Figure 10. 表5-5 取余法和平方取中法的对比我们也可以为基于字符的元素(比如字符串)创建散列函数。可以将单词 “cat” 看作序数值序列,如下所示。
>>> ord('c') 99 >>> ord('a') 97 >>> ord('t') 116因此,可以将这些序数值相加,并采用取余法得到散列值,如图5-6 所示。代码清单5-5 给出了 hash 函数的定义,传入一个字符串和散列表的大小,该函数会返回散列值,其取值范围是 0 到 tablesize-1。
 Figure 11. 图5-6 利用序数值计算字符串的散列值代码清单5-5 为字符串构建简单的散列函数
Figure 11. 图5-6 利用序数值计算字符串的散列值代码清单5-5 为字符串构建简单的散列函数def hash(astring, tablesize): sum = 0 for pos in range(len(astring)): sum = sum + ord(astring[pos]) return sum%tablesize有趣的是,针对异序词,这个散列函数总是得到相同的散列值。要弥补这一点,可以用字符位置作为权重因子,如图5-7 所示。作为练习,请修改 hash 函数,为字符添加权重值。
 Figure 12. 图5-7 在考虑权重的同时,利用序数值计算字符串的散列值
Figure 12. 图5-7 在考虑权重的同时,利用序数值计算字符串的散列值你也许能想到多种计算散列值的其他方法。重要的是,散列函数一定要高效,以免它成为存储和搜索过程的负担。如果散列函数过于复杂,计算槽编号的工作量可能比在进行顺序搜索或二分搜索时的更大,这可不是散列的初衷。
-
处理冲突
现在回过头来解决冲突问题。当两个元素被分到同一个槽中时,必须通过一种系统化方法在散列表中安置第二个元素。这个过程被称为处理冲突。前文说过,如果散列函数是完美的,冲突就永远不会发生。然而,这个前提往往不成立,因此处理冲突是散列计算的重点。
一种方法是在散列表中找到另一个空槽,用于放置引起冲突的元素。简单的做法是从起初的散列值开始,顺序遍历散列表,直到找到一个空槽。注意,为了遍历散列表,可能需要往回检查第一个槽。这个过程被称为开放定址法,它尝试在散列表中寻找下一个空槽或地址。由于是逐个访问槽,因此这个做法被称作 线性探测。
现在扩展表5-4 中的元素,得到新的整数集合(54, 26, 93, 17, 77, 31, 44, 55,20),图5-8 展示了新整数集合经过取余散列函数处理后的结果。请回顾图5-5 所示的初始内容。当我们尝试把 44 放入 0 号槽时,就会产生冲突。采用线性探测,依次检查每个槽,直到找到一个空槽,在本例中即为 1 号槽。
 Figure 13. 图5-8 采用线性探测处理冲突
Figure 13. 图5-8 采用线性探测处理冲突同理,55 应该被放入 0 号槽,但是为了避免冲突,必须被放入 2 号槽。集合中的最后一个元素是 20,它的散列值对应 9 号槽。因为 9 号槽中已有元素,所以开始线性探测,依次访问 10 号槽、0号槽、1号槽和 2 号槽,最后找到空的 3 号槽。
一旦利用开放定址法和线性探测构建出散列表,即可使用同样的方法来搜索元素。假设要查找元素 93,它的散列值是 5。查看 5 号槽,发现槽中的元素就是 93,因此返回 True。如果要查找的是 20,又会如何呢?20 的散列值是 9,而 9 号槽中的元素是 31。因为可能有冲突,所以不能直接返回 False,而是应该从 10 号槽开始进行顺序搜索,直到找到元素 20 或者遇到空槽。
线性探测有个缺点,那就是会使散列表中的元素出现聚集现象。也就是说,如果一个槽发生太多冲突,线性探测会填满其附近的槽,而这会影响到后续插入的元素。在尝试插入元素 20 时,要越过数个散列值为 0 的元素才能找到一个空槽。图5-9 展示了这种聚集现象。
 Figure 14. 图5-9 散列值为0的元素聚集在一起
Figure 14. 图5-9 散列值为0的元素聚集在一起要避免元素聚集,一种方法是扩展线性探测,不再依次顺序查找空槽,而是跳过一些槽,这样做能使引起冲突的元素分布得更均匀。图5-10 展示了采用 “加3” 探测策略处理冲突后的元素分布情况。发生冲突时,为了找到空槽,该策略每次跳两个槽。
 Figure 15. 图5-10 采用“加3”探测策略处理冲突
Figure 15. 图5-10 采用“加3”探测策略处理冲突再散列 泛指在发生冲突后寻找另一个槽的过程。采用线性探测时,再散列函数是 newhashvalue = rehash(oldhashvalue),并且 rehash(pos) = (pos +1)%sizeoftable。“加3” 探测策略的再散列函数可以定义为 rehash(pos) = (pos + 3)%sizeoftable。也就是说,可以将再散列函数定义为 rehash(pos) = (pos +skip)%sizeoftable。注意,“跨步”(skip)的大小要能保证表中所有的槽最终都被访问到,否则就会浪费槽资源。要保证这一点,常常建议散列表的大小为素数,这就是本例选用 11 的原因。
平方探测 是线性探测的一个变体,它不采用固定的跨步大小,而是通过再散列函数递增散列值。如果第一个散列值是h,后续的散列值就是 h+1、h+4、h+9、h+16,等等。换句话说,平方探测的跨步大小是一系列完全平方数。图5-11 展示了采用平方探测处理后的结果。
 Figure 16. 图5-11 采用平方探测处理冲突
Figure 16. 图5-11 采用平方探测处理冲突另一种处理冲突的方法是让每个槽有一个指向元素集合(或链表)的引用。链接法允许散列表中的同一个位置上存在多个元素。发生冲突时,元素仍然被插入其散列值对应的槽中。不过,随着同一个位置上的元素越来越多,搜索变得越来越困难。图5-12 展示了采用链接法解决冲突后的结果。
 Figure 17. 图5-12 采用链接法处理冲突
Figure 17. 图5-12 采用链接法处理冲突搜索目标元素时,我们用散列函数算出它对应的槽编号。由于每个槽都有一个元素集合,因此需要再搜索一次,才能得知目标元素是否存在。链接法的优点是,平均算来,每个槽的元素不多,因此搜索可能更高效。本节最后会分析散列算法的性能。
-
实现映射抽象数据类型
字典是最有用的 Python 集合之一。第1章说过,字典是存储键-值对的数据类型。键用来查找关联的值,这个概念常常被称作 映射。
映射抽象数据类型定义如下。它是将键和值关联起来的无序集合,其中的键是不重复的,键和值之间是一一对应的关系。映射支持以下操作。
-
Map() 创建一个空的映射,它返回一个空的映射集合。
-
put(key, val) 往映射中加入一个新的键-值对。如果键已经存在,就用新值替换旧值。
-
get(key) 返回 key 对应的值。如果 key 不存在,则返回 None。
-
del 通过 del map[key] 这样的语句从映射中删除键-值对。
-
len() 返回映射中存储的键-值对的数目。
-
in 通过 key in map 这样的语句,在键存在时返回 True,否则返回 False。
使用字典的一大优势是,给定一个键,能很快找到其关联的值。为了提供这种快速查找能力,需要能支持高效搜索的实现方案。虽然可以使用列表进行顺序搜索或二分搜索,但用前面描述的散列表更好,这是因为散列搜索算法的时间复杂度可以达到 \$O(1)\$。
代码清单5-6 使用两个列表创建 HashTable 类,以此实现映射抽象数据类型。其中,名为 slots 的列表用于存储键,名为 data 的列表用于存储值。两个列表中的键与值一一对应。在本节的例子中,散列表的初始大小是 11。尽管初始大小可以任意指定,但选用一个素数很重要,这样做可以尽可能地提高冲突处理算法的效率。
代码清单5-6 HashTable类的构造方法class HashTable: def __init__(self): self.size = 11 self.slots = [None] * self.size self.data = [None] * self.size在代码清单5-7 中,hashfunction 实现了简单的取余函数。处理冲突时,采用 “加1” 再散列函数的线性探测法。put 函数假设,除非键已经在 self.slots 中,否则总是可以分配一个空槽。该函数计算初始的散列值,如果对应的槽中已有元素,就循环运行 rehash 函数,直到遇见一个空槽。如果槽中已有这个键,就用新值替换旧值。
代码清单5-7 put函数def put(self,key,data): hashvalue = self.hashfunction(key,len(self.slots)) if self.slots[hashvalue] == None: self.slots[hashvalue] = key self.data[hashvalue] = data else: if self.slots[hashvalue] == key: self.data[hashvalue] = data #replace else: nextslot = self.rehash(hashvalue,len(self.slots)) while self.slots[nextslot] != None and \ self.slots[nextslot] != key: nextslot = self.rehash(nextslot,len(self.slots)) if self.slots[nextslot] == None: self.slots[nextslot]=key self.data[nextslot]=data else: self.data[nextslot] = data #replace def hashfunction(self,key,size): return key%size def rehash(self,oldhash,size): return (oldhash+1)%size同理,get 函数也先计算初始散列值,如代码清单5-8 所示。如果值不在初始散列值对应的槽中,就使用 rehash 确定下一个位置。注意,第 15 行确保搜索最终一定能结束,因为不会回到初始槽。如果遇到初始槽,就说明已经检查完所有可能的槽,并且元素必定不存在。
HashTable 类的最后两个方法提供了额外的字典功能。我们重载
__getitem__和__setitem__,以通过[]进行访问。这意味着创建 HashTable 类之后,就可以使用熟悉的索引运算符了。其余方法的实现留作练习。代码清单5-8 get函数def get(self,key): startslot = self.hashfunction(key,len(self.slots)) data = None stop = False found = False position = startslot while self.slots[position] != None and \ not found and not stop: if self.slots[position] == key: found = True data = self.data[position] else: position=self.rehash(position,len(self.slots)) if position == startslot: stop = True return data def __getitem__(self,key): return self.get(key) def __setitem__(self,key,data): self.put(key,data)下面来看看运行情况。首先创建一个散列表并插入一些元素。其中,键是整数,值是字符串。
>>> H = HashTable() >>> H[54] = "cat" >>> H[26] = "dog" >>> H[93] = "lion" >>> H[17] = "tiger" >>> H[77] = "bird" >>> H[31] = "cow" >>> H[44] = "goat" >>> H[55] = "pig" >>> H[20] = "chicken" >>> H.slots [77, 44, 55, 20, 26, 93, 17, None, None, 31, 54] >>> H.data ['bird', 'goat', 'pig', 'chicken', 'dog', 'lion', 'tiger', None, None, 'cow', 'cat']接下来,访问并修改散列表中的某些元素。注意,键 20 的值已被修改。
>>> H[20] 'chicken' >>> H[17] 'tiger' >>> H[20] = 'duck' >>> H[20] 'duck' >>> H.data ['bird', 'goat', 'pig', 'duck', 'dog', 'lion', 'tiger', None, None, 'cow', 'cat'] >>> print(H[99]) None -
-
分析散列搜索算法
在最好情况下,散列搜索算法的时间复杂度是 \$O(1)\$,即常数阶。然而,因为可能发生冲突,所以比较次数通常不会这么简单。尽管对散列的完整分析超出了讨论范围,但是本书在此还是提一下近似的比较次数。
在分析散列表的使用情况时,最重要的信息就是载荷因子 λ。从概念上来说,如果λ很小,那么发生冲突的概率就很小,元素也就很有可能各就各位。如果λ很大,则意味着散列表很拥挤,发生冲突的概率也就很大。因此,冲突解决起来会更难,找到空槽所需的比较次数会更多。若采用链接法,冲突越多,每条链上的元素也越多。
和之前一样,来看看搜索成功和搜索失败的情况。采用线性探测策略的开放定址法,搜索成功的平均比较次数如下。
搜索失败的平均比较次数如下。
若采用链接法,则搜索成功的平均比较次数如下。
搜索失败时,平均比较次数就是 λ。